Georgios Grigoriadis (George)
MDes Spring 2022
Abstract
From their conception, humans were always fascinated by the potential of robots. The whole notion of robotics, of artificial systems that could take physical actions is surprisingly an old one. One could trace fragments of the concept in many cultures around the world throughout the centuries.
What could be considered “creative” contains a certain degree of ambiguity, meaning that creating a system to respond creatively might be difficult and be open to different interpretations on the degree of this creativity. This thesis does not intend to answer the question “Can robots be creative?”, but rather explore how creative robots will feel during a co-creative experience. Sympoiesis focuses on the range of nuances in an interaction between industrial robotic arms and humans within creative processes that occur in architecture, design and art. Through concurrent interaction between two creators, a human and a robot and a simple series of design games, it investigates what are the elements, behaviors and affordances of designing and creating with robots. In this way, the project thereby advocates for research on the protocols of human-robot relations and creative tasks.

Methods
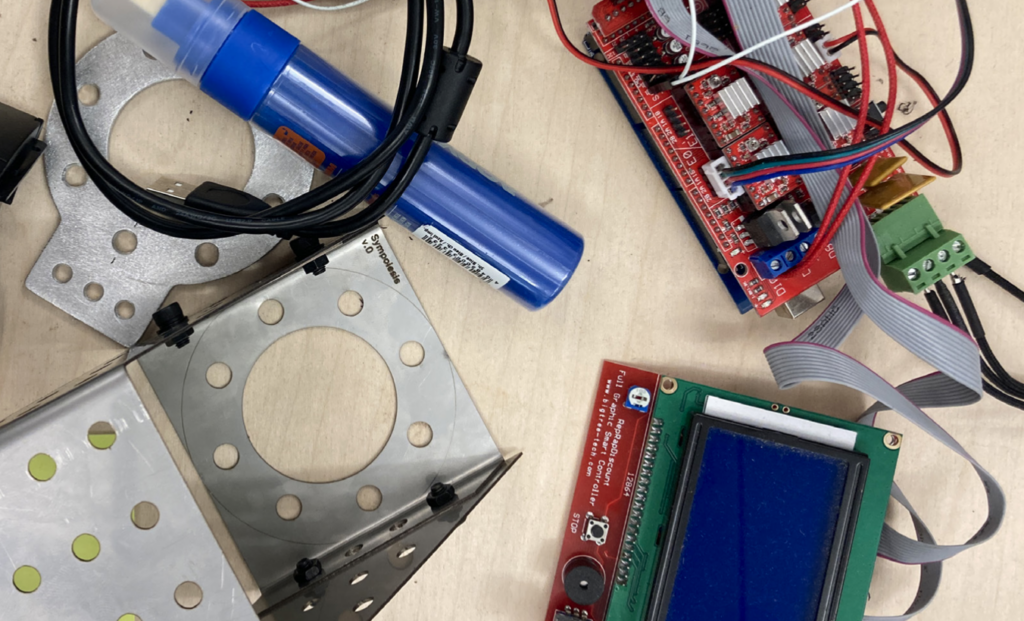
In this project, a KUKA KR6 R900 industrial robotic arm is used as the main platform of the interaction. The robotic arm is equipped with a custom toolhead that holds a series of sensing and actuating mechanisms to assist in a co-creative drawing experience. The movements and actions of the human are analyzed as vocabularies of geometrical elements and act as input to the robot to interpret them and respond through movements and drawing gestures. As an initial iteration of this project, the interaction between robot and human is curated around a version of the design concept game, Silent Game (Habraken, 1987) and a series of short planar drawing exercises.
Back to Student Work